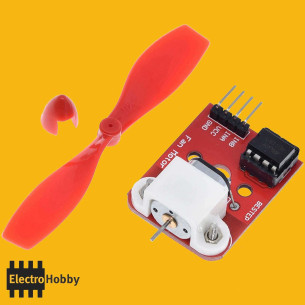
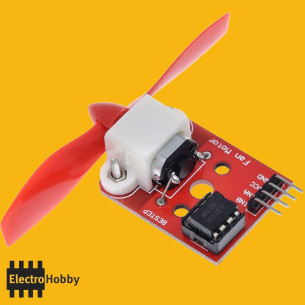
Los motores DC convierten la energía eléctrica en movimiento rotatorio (motores de corriente continua o motor CC) son la base del movimiento en muchos proyectos con Arduino, microcontroladores y robótica educativa.
Permiten crear coches robot, cintas transportadoras, mecanismos móviles y experimentos STEM donde el alumnado ve de forma directa cómo la electrónica se convierte en movimiento real.
Motores DC Arduino
Los motores DC Arduino son motores de corriente continua, se alimentan con tensiones bajas (típicamente entre 3 y 12V) y se controlan mediante drivers o shields, lo que permite manejar velocidad y sentido de giro desde el código sin complicaciones.
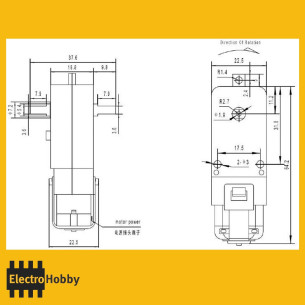
El motor micro (micro motor DC) es una versión de tamaño reducido del motor de corriente continua, pensado para proyectos donde el espacio es limitado o se requieren movimientos más finos para pequeños robots.
Hablar de motor CC y de motor DC es hablar del mismo tipo de dispositivo: un motor de corriente continua con escobillas, sencillo y robusto, que convierte energía eléctrica en movimiento mecánico. Su simplicidad lo hace perfecto para introducir conceptos de motores, par, velocidad y carga en el aula.
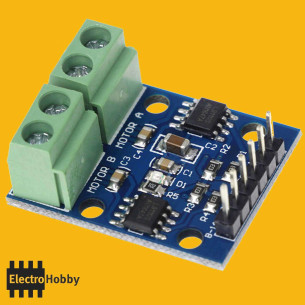
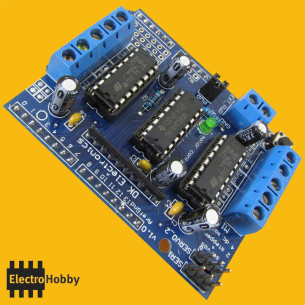
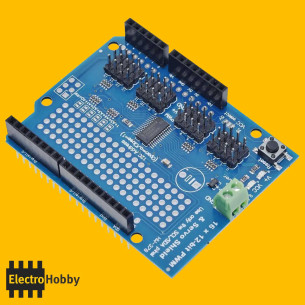
Los motores DC necesitan un driver o controlador motor que actúe como puente entre la electrónica de control y la parte de potencia. Sin este elemento, la placa no puede suministrar la corriente suficiente ni protegerse adecuadamente. Permiten gestionar uno o varios motores DC ajustando velocidad y dirección desde el programa.
Usa siempre un driver de motor adecuado en lugar de conectar el motor directamente a la placa, para proteger las salidas del microcontrolador.
Separa la alimentación de lógica (Arduino, sensores) de la alimentación de motores cuando sea posible, para evitar reinicios por caídas de tensión.
Calcula o estima el consumo total de tus motores y elige una fuente o pack de pilas que pueda suministrar esa corriente con margen.
Fija bien los motores a sus soportes y chasis; un montaje mecánico flojo suele provocar vibraciones, desalineaciones.
Empieza probando los motores con ejemplos básicos (adelante, atrás, giro sobre sí mismo) antes de implementar lógicas más complejas de seguimiento de línea o evasión de obstáculos.
¿Qué es un motor DC?
Un motor DC, motor de corriente continua o motor CC, es un dispositivo que convierte energía eléctrica en movimiento rotatorio utilizando corriente continua, permitiendo controlar velocidad y sentido de giro variando la tensión o la polaridad.
¿Puedo conectar un motor DC directamente a Arduino?
No es recomendable: las salidas de Arduino no proporcionan la corriente necesaria y puedes dañar la placa. Debes usar un driver de motor.
¿Qué fuente de alimentación necesito para un robot con dos motores?
Depende del modelo de motores, pero habitualmente se usan packs de 4–6 pilas AA o baterías equivalentes que puedan suministrar la corriente de ambos motores más la electrónica, dejando cierto margen.
¿Cómo controlo la velocidad de un motor DC?
Se utiliza PWM desde el microcontrolador aplicado al driver de motor: variando el ciclo de trabajo de la señal se ajusta la velocidad sin perder demasiado par.
¿Por qué mi robot se reinicia cuando arrancan los motores?
Suele deberse a caídas de tensión: la fuente no da suficiente corriente o la alimentación de motores y placa no está bien separada o filtrada.