Carrito

{kind=link}

27,90 €
El PIC16F628A es un microcontrolador de 8 bits desarrollado por Microchip Technology, una empresa líder en la fabricación de semiconductores. Este dispositivo pertenece a la familia PIC16, conocida por su equilibrio entre rendimiento y eficiencia energética.
Accesorios

El microcontrolador PIC16F628A se ha ganado una reputación sólida por su versatilidad y robustez, convirtiéndose en una opción popular para una amplia gama de aplicaciones, desde proyectos educativos hasta sistemas industriales complejos, es un microcontrolador de 8 bits desarrollado por Microchip Technology
La designación "16F628A" nos proporciona información valiosa sobre sus capacidades:
El "16" indica que pertenece a la serie de microcontroladores de gama media de Microchip.
La "F" denota que utiliza memoria Flash para el almacenamiento del programa, lo que permite una fácil reprogramación.
El "628" es el número de modelo específico dentro de la serie.
La "A" final señala que es una versión mejorada del modelo original, con características adicionales como módulos de comparación analógicos.
El dispositivo cuenta con 2048 palabras de memoria Flash para el programa, lo que equivale a 2K de espacio de almacenamiento. Esta capacidad es suficiente para una amplia variedad de aplicaciones de complejidad media.
Dispone de 224 bytes de memoria RAM, dividida en dos bancos. Esta memoria se utiliza para almacenar variables y datos temporales durante la ejecución del programa.
Incorpora 128 bytes de memoria EEPROM, ideal para almacenar datos que deben conservarse incluso cuando se desconecta la alimentación.
Puede operar a frecuencias de hasta 20 MHz, lo que se traduce en una capacidad de procesamiento de hasta 5 MIPS (Millones de Instrucciones por Segundo).
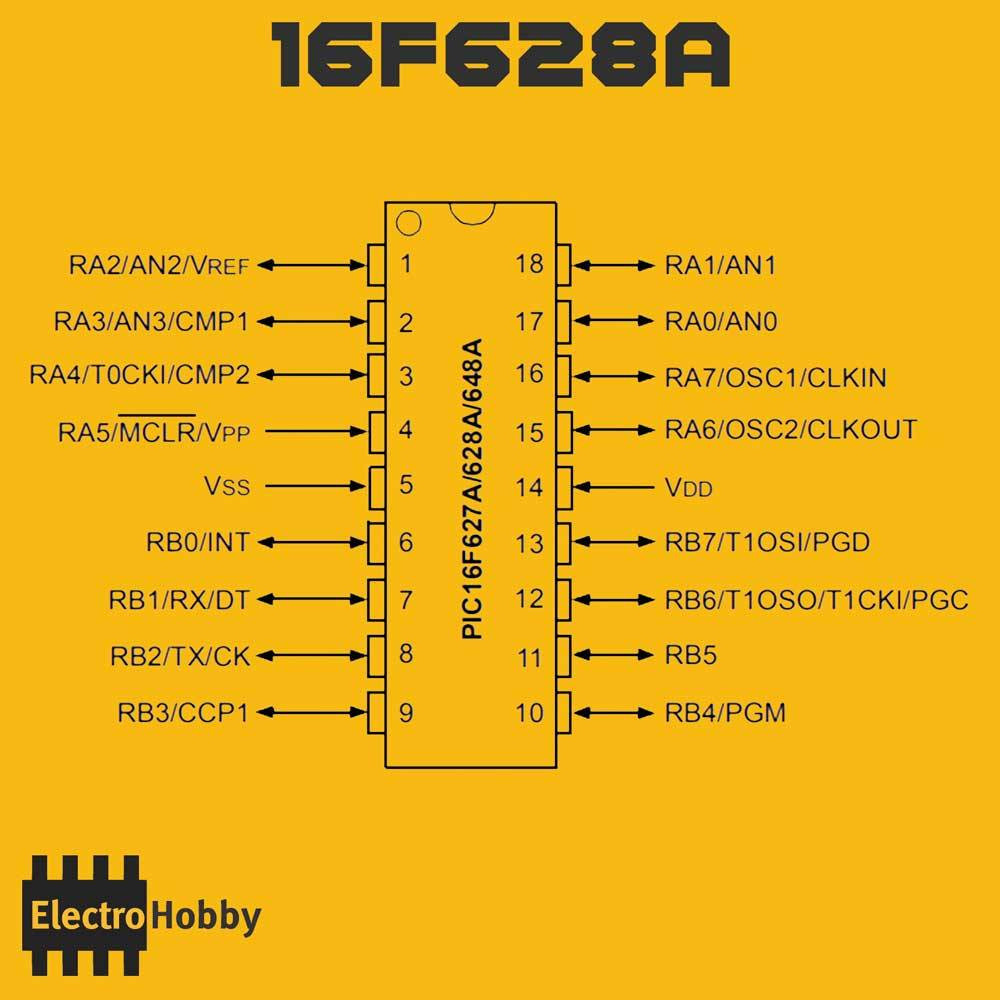
El PIC 16F628A ofrece una flexibilidad considerable en términos de E/S:
Puerto A: 8 pines de E/S bidireccionales.
Puerto B: 8 pines de E/S bidireccionales.
Estos puertos son configurables por software, permitiendo adaptarlos a las necesidades específicas de cada proyecto.
Comparadores Analógicos: Incluye dos comparadores analógicos que pueden ser utilizados para diversas aplicaciones de control y medición.
Módulo CCP: Cuenta con un módulo de Captura, Comparación y PWM, útil para generar señales de control precisas o medir intervalos de tiempo.
USART: Incorpora un módulo de comunicación serie asíncrona/síncrona, facilitando la comunicación con otros dispositivos o computadoras.
Watchdog Timer: Este temporizador de vigilancia ayuda a prevenir bloqueos del sistema, reiniciando el microcontrolador si se produce un mal funcionamiento.
Para aprovechar al máximo las capacidades del PIC 16F628A, es crucial familiarizarse con las herramientas de desarrollo y los lenguajes de programación compatibles.
Existen varios IDEs populares para programar el PIC 16F628A:
MPLAB X IDE: Es el entorno oficial de Microchip, gratuito y compatible con todos los microcontroladores PIC. Ofrece una interfaz intuitiva y potentes herramientas de depuración.
MikroC PRO for PIC: Un IDE que utiliza el lenguaje C, facilitando la programación para aquellos familiarizados con este lenguaje.
PIC C Compiler: Otro entorno basado en C, conocido por su eficiencia y amplia biblioteca de funciones.
Proteus: Aunque principalmente es un simulador, también permite la programación y es excelente para probar diseños antes de implementarlos físicamente.
El PIC 16F628A puede programarse utilizando varios lenguajes:
Ensamblador: Ofrece el máximo control sobre el hardware y la mejor eficiencia, pero requiere un conocimiento profundo de la arquitectura del microcontrolador.
C: Es el lenguaje más comúnmente utilizado debido a su equilibrio entre facilidad de uso y eficiencia.
BASIC: Ideal para principiantes, con variantes como PicBasic Pro que simplifican la programación.
Escritura del Código: Se desarrolla el programa utilizando el IDE y lenguaje elegidos.
Compilación: El código se compila para generar un archivo hexadecimal.
Depuración: Se utilizan herramientas de simulación para verificar el funcionamiento del programa.
Programación del Dispositivo: El archivo hexadecimal se carga en el PIC 16F628A utilizando un programador de hardware.
El PIC 16F628A ofrece una variedad de periféricos integrados que amplían significativamente sus capacidades. Comprender cómo configurar y utilizar estos periféricos es esencial para aprovechar al máximo este microcontrolador.
Los puertos A y B del PIC 16F628A son altamente flexibles:
Configuración de Dirección: Cada pin puede configurarse individualmente como entrada o salida mediante los registros TRISA y TRISB.
Pull-ups Internos: El Puerto B cuenta con resistencias pull-up internas que pueden activarse o desactivarse según sea necesario.
Interrupciones: Algunos pines pueden configurarse para generar interrupciones ante cambios de estado, útil para aplicaciones que requieren respuesta rápida a eventos externos.
El módulo USART (Universal Synchronous Asynchronous Receiver Transmitter) es crucial para la comunicación serie:
Configuración: Se debe establecer la velocidad de baudios, el formato de trama y el modo de operación (síncrono o asíncrono).
Transmisión de Datos: Los datos se envían escribiendo en el registro TXREG.
Recepción de Datos: Los datos recibidos se leen del registro RCREG.
Interrupciones: Se pueden habilitar interrupciones para la transmisión y recepción, permitiendo una comunicación más eficiente.
El PIC 16F628A incluye tres temporizadores:
Timer0: Un temporizador/contador de 8 bits con prescaler programable.
Timer1: Un temporizador/contador de 16 bits.
Timer2: Un temporizador de 8 bits con prescaler y postscaler.
Estos temporizadores son útiles para generar retardos precisos, medir intervalos de tiempo o generar interrupciones periódicas.
Este módulo versátil puede utilizarse en tres modos:
Modo Captura: Para medir la duración de pulsos o intervalos entre eventos.
Modo Comparación: Para generar salidas precisas en momentos específicos.
Modo PWM: Para generar señales de modulación por ancho de pulso, útiles en control de motores y regulación de potencia.
Los dos comparadores analógicos pueden configurarse para comparar señales analógicas con referencias internas o externas, útiles en aplicaciones de control y monitoreo.
El PIC 16F628A es versátil y se utiliza en una amplia gama de aplicaciones. Aquí presentamos algunos ejemplos prácticos que demuestran su potencial:
Un sistema de control de temperatura utilizando el PIC 16F628A puede implementarse de la siguiente manera:
Sensor de Temperatura: Utilizar un sensor analógico como el LM35 conectado a un pin de entrada analógica.
Conversión A/D: Aunque el PIC 16F628A no tiene ADC integrado, se puede implementar uno por software.
Control: Utilizar el módulo PWM para controlar un elemento calefactor o un ventilador.
Visualización: Mostrar la temperatura en un display LCD.
Un sistema de alarma básico puede incluir:
Sensores: Conectar sensores de movimiento o interruptores magnéticos a los pines de entrada.
Sirena: Utilizar un pin de salida para activar una sirena.
Teclado: Implementar un teclado matricial para la entrada de códigos.
Comunicación: Usar el módulo USART para enviar alertas a un sistema central.
El PIC 16F628A es excelente para aplicaciones de control de motores:
PWM: Utilizar el módulo PWM para controlar la velocidad de motores DC.
Control de Dirección: Usar pines de salida para controlar un puente H.
Retroalimentación: Implementar un encoder para medir la posición o velocidad del motor.
Un datalogger simple puede construirse utilizando:
Sensores: Conectar varios sensores a los pines de entrada.
Almacenamiento: Utilizar la EEPROM interna para almacenar datos.
Reloj: Implementar un reloj en tiempo real utilizando el Timer1.
Interfaz: Usar el módulo USART para descargar datos a una PC.

Accesorios